
您现在的位置是:主页 > 汽车快讯 > 特斯拉 >
蔚小理面临挑战,如何应对特斯拉的强势?
发布时间:2024年08月23日 15:15:05 特斯拉 人已围观
简介最新的端到端切换使得车企的智驾竞赛回归同一水平。特斯拉在北美推出的FSD v12.5版本展示了优秀的表现,引发国内厂商的关注与学习,推动了本年度智能驾驶技术的升级。...
一次深刻的全行业端到端转型,使得汽车制造商的智能驾驶角逐重新回到同一出发点。
特斯拉在北美地区推出的基于端到端架构的FSD v12.5版本已显示出令人瞩目的效果,自今年以来,国内企业纷纷从中汲取智能驾驶技术升级的“秘笈”。(关于端到端技术的详细原理可参见虎嗅汽车团队的文章《特斯拉,要跟华为开战了》)
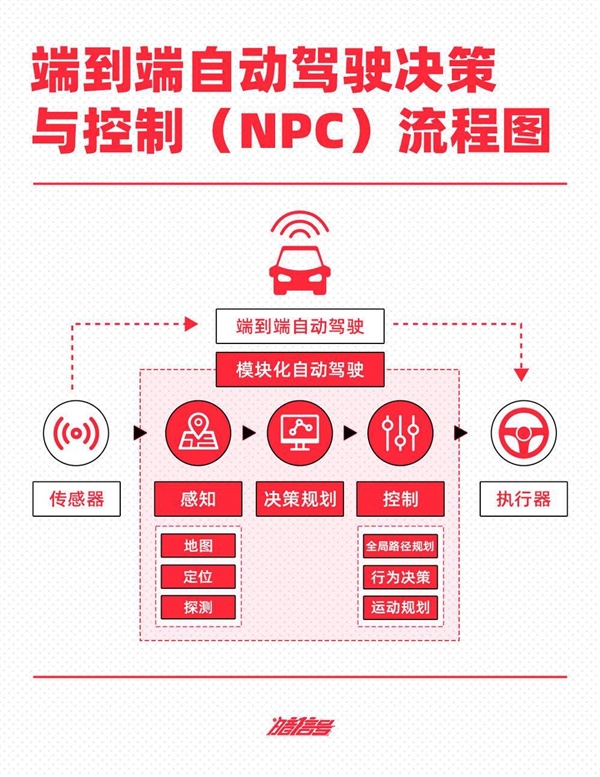
在模块化开发规则盛行的时代,代码错误的修复能力越高,智能驾驶的表现越佳,同一市场内的参与者也因开城和落地的速度而各自分化。然而,仅依靠传统的智能驾驶规则无法根本性地解决对现实世界的理解与推理的问题,许多复杂场景和边角案例依旧困扰着企业。
因此,“上限有限”的规则时代迅速被大模型和端到端技术所取代,尤其是后者以其迅猛的迭代步伐,令众多车企纷纷抛弃旧有规则,投身于端到端技术的探索,包括蔚小理华等企业。
端到端已经成为智能驾驶行业认可的下一代解决方案,尽管没有明确声称端到端将是自动驾驶的最终解决方案,但目前还没有比端到端更优的智能驾驶技术。
基于此,本期暗信号旨在分析当前领先企业如何布局“端到端技术路线”,通过各家不同的策略和实施进展,观察汽车制造商智能驾驶能力的演变以及未来行业竞争的关键点。
理想:双系统协同,“世界模型”外挂
理想汽车无疑是端到端道路上的先锋。
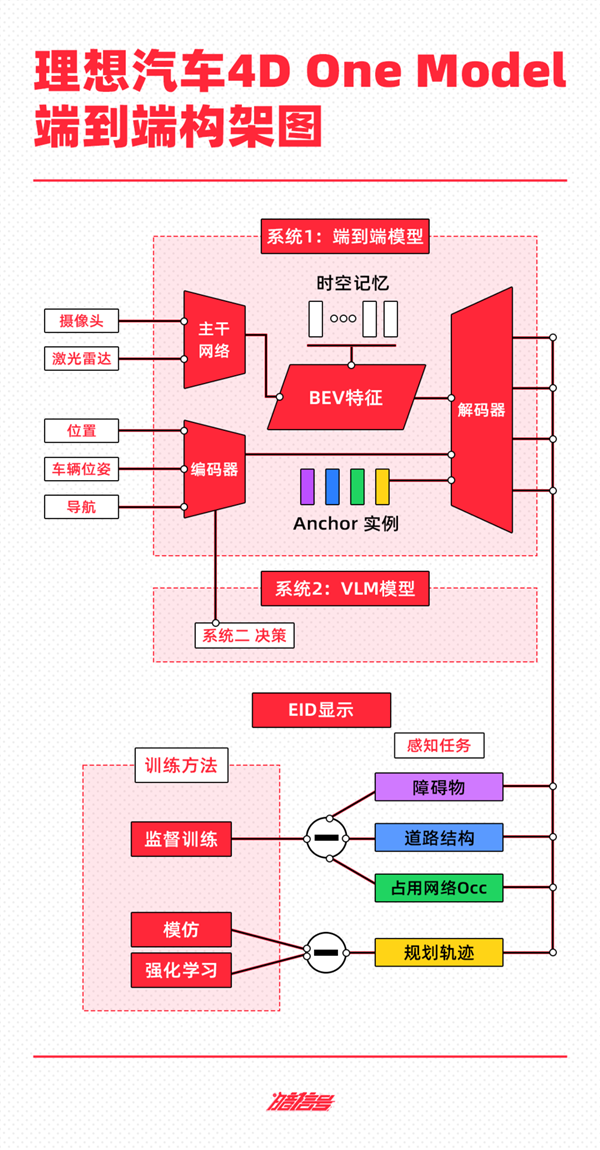
理想汽车公开的技术架构显示,其端到端自动驾驶方案由端到端模型、VLM视觉语言模型和世界模型三部分组成。
在快慢系统理论的基础上,理想打造了自动驾驶算法框架的雏形——
系统1由One Model端到端模型实现,负责接收传感器数据并直接输出行驶路径来控制车辆;
系统2为VLM视觉语言模型,接收传感器输入后,通过逻辑思考将决策信息反馈给系统1。
这两大系统的自动驾驶能力将在云端利用世界模型进行训练和验证。
端到端模型的输入主要由摄像头与激光雷达构成,多个传感器的特征通过CNN主干网络提取、融合,再投影到BEV空间,结合车辆状态与导航信息,经过Transformer模型编码,与BEV特征共同解码出动态障碍物、道路结构和通用障碍物,进而规划出驾驶轨迹。
目前,系统1的训练数据库已超过3亿个参数,使得这一模型在实际驾驶中展现出更强的通用障碍物理解能力、超视距导航能力和道路结构理解能力等。
系统2即VLM视觉语言模型主要处理5%的特殊交通场景,比如限制通行、潮汐车道等复杂交通规则,相当于副驾驶座上有位驾校教练实时监督驾驶行为,现已积累22亿参数。


